XE ROBOT 2 BÁNH TỰ CÂN BẰNG SỬ DỤNG BOARD ARDUINO MEGA 2560
Robot 2 bánh tự cân bằng dựa trên mô hình con lắc ngược là một đối tượng phi tuyến với các tham số bất định khó điều khiển với 6 biến trạng thái. Đặc điểm nổi bật của Robot 2 bánh tự cân bằng là cơ chế tự cân bằng, giúp cho xe dù chỉ có một trục chuyển động với hai bánh nhưng luôn ở trạng thái cân bằng.
Có rất nhiều công trình nghiên cứu về xe hai bánh tự cân bằng, nghiên cứu điều khiển xe 2 bánh tự cân bằng dùng giải thuật cuốn chiếu (backstepping control), H vô cùng, LQR, phương pháp điều khiển bền vững, cho thấy khả năng thích nghi và hiệu quả của những giải pháp điều khiển.
Trong bài này tôi giới thiệu các bạn phương pháp đơn giản nhất là giải thuật PID.
Phần cứng chuẩn bị:
1. Khung xe robot 2 bánh: Xem chi tiết tại đây

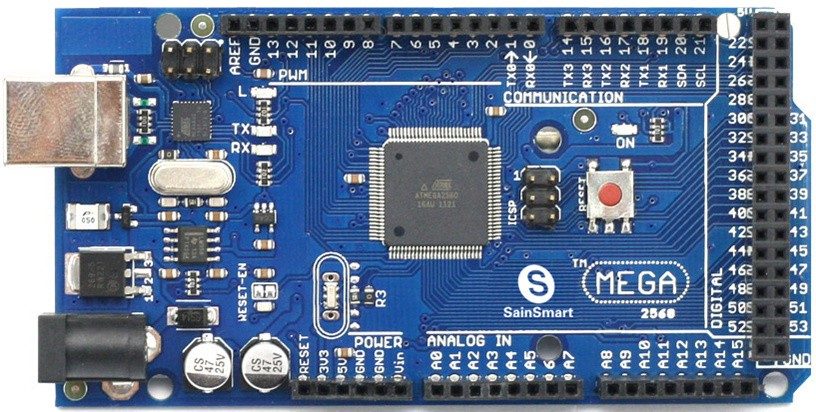
2. Board mega 2560: Xem tại đây
2. Board L298n: Xem tại đây

3. Cảm biến góc nghiêng ( mpu 6050):

4. Nguồn ( 3 pin 3.7V ):

5. Một số phụ kiện khác như: tấm mica, công tắc, dây cắm test:
Sơ đồ nối dây:

Hình ảnh thực tế:

File code ( sử dụng phương pháp điều khiển PID):
https://drive.google.com/open?id=1kLVmUterH2A3tUthhyydqMp4H7hkSo8M

Bình luận(5)